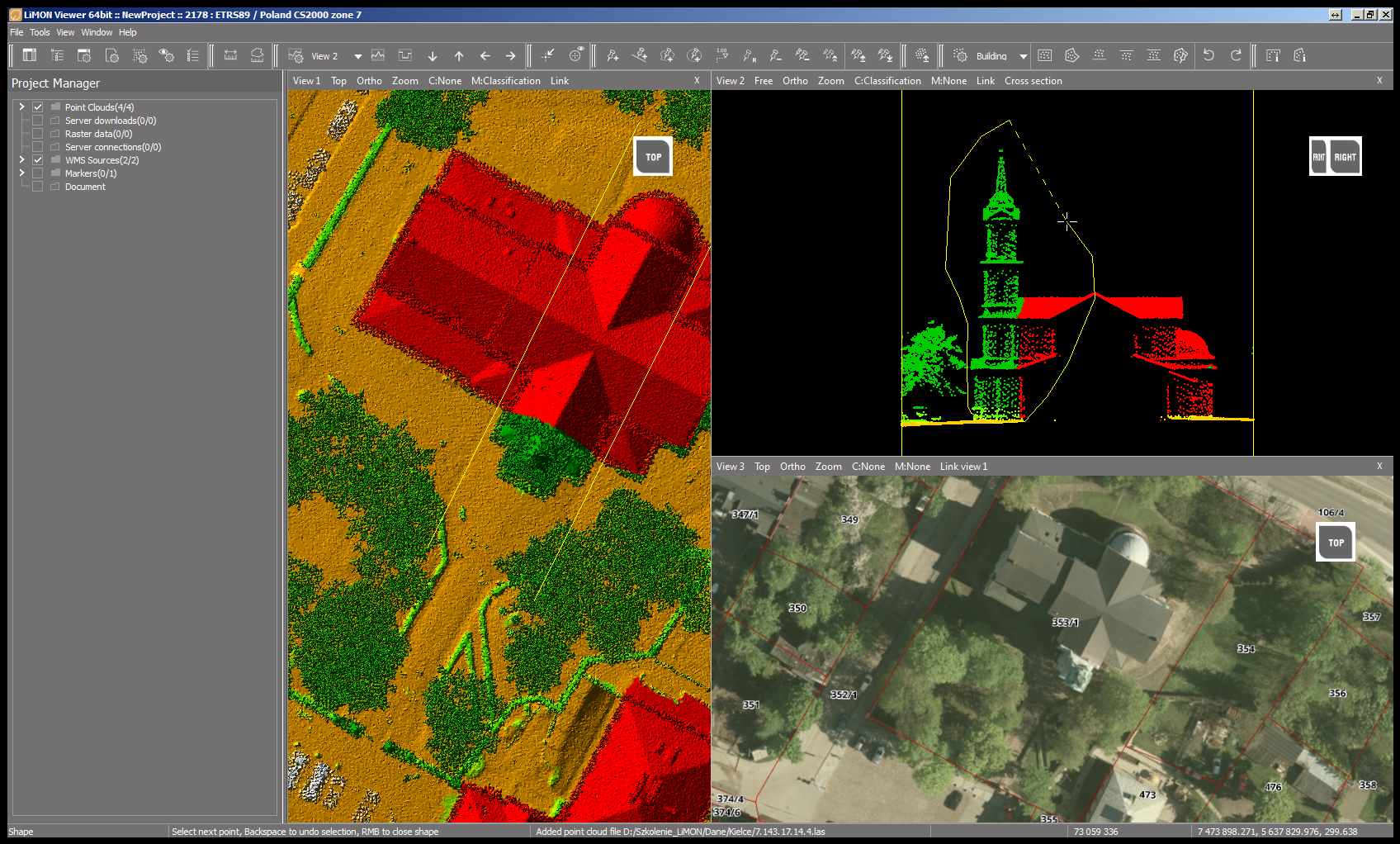
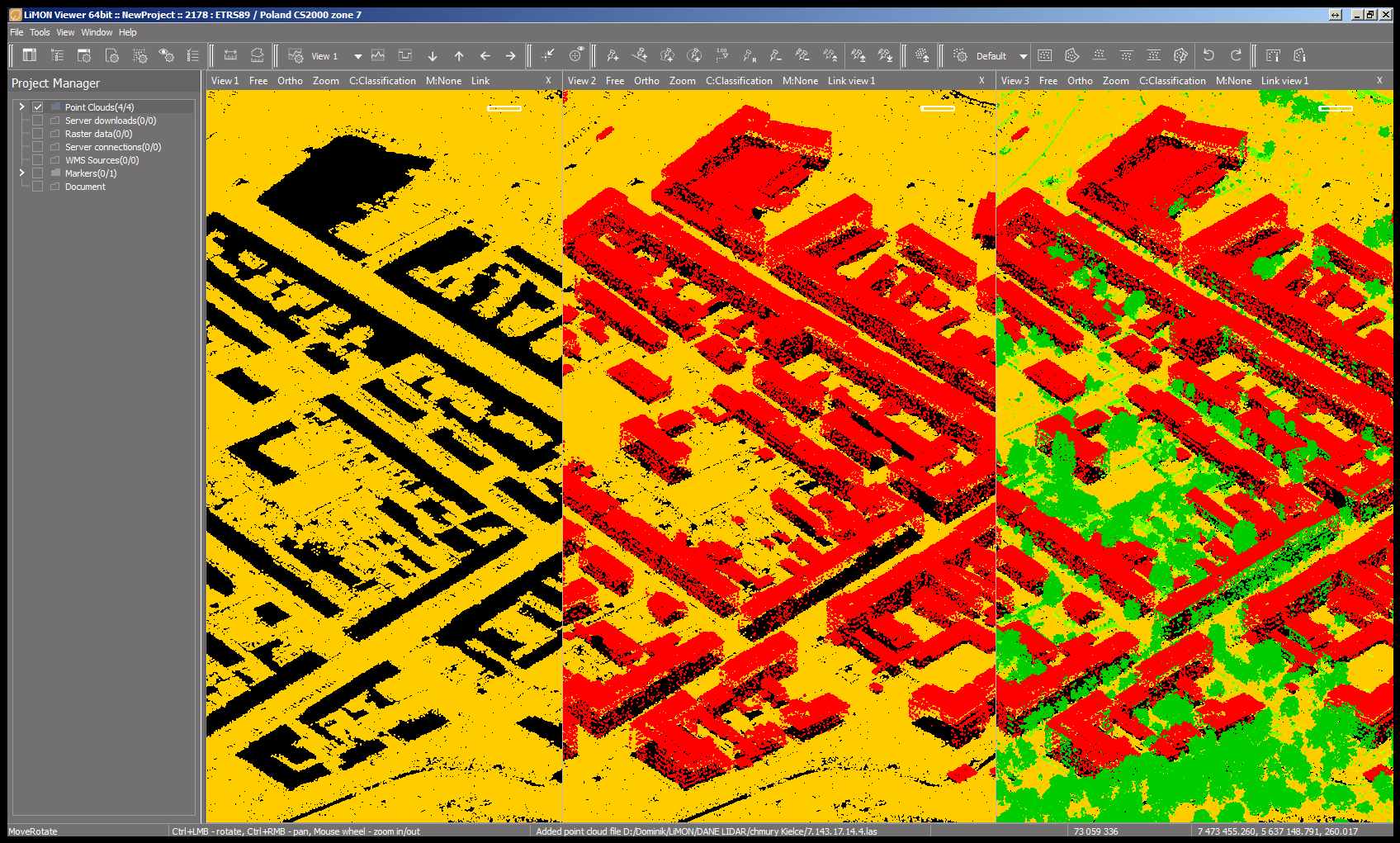
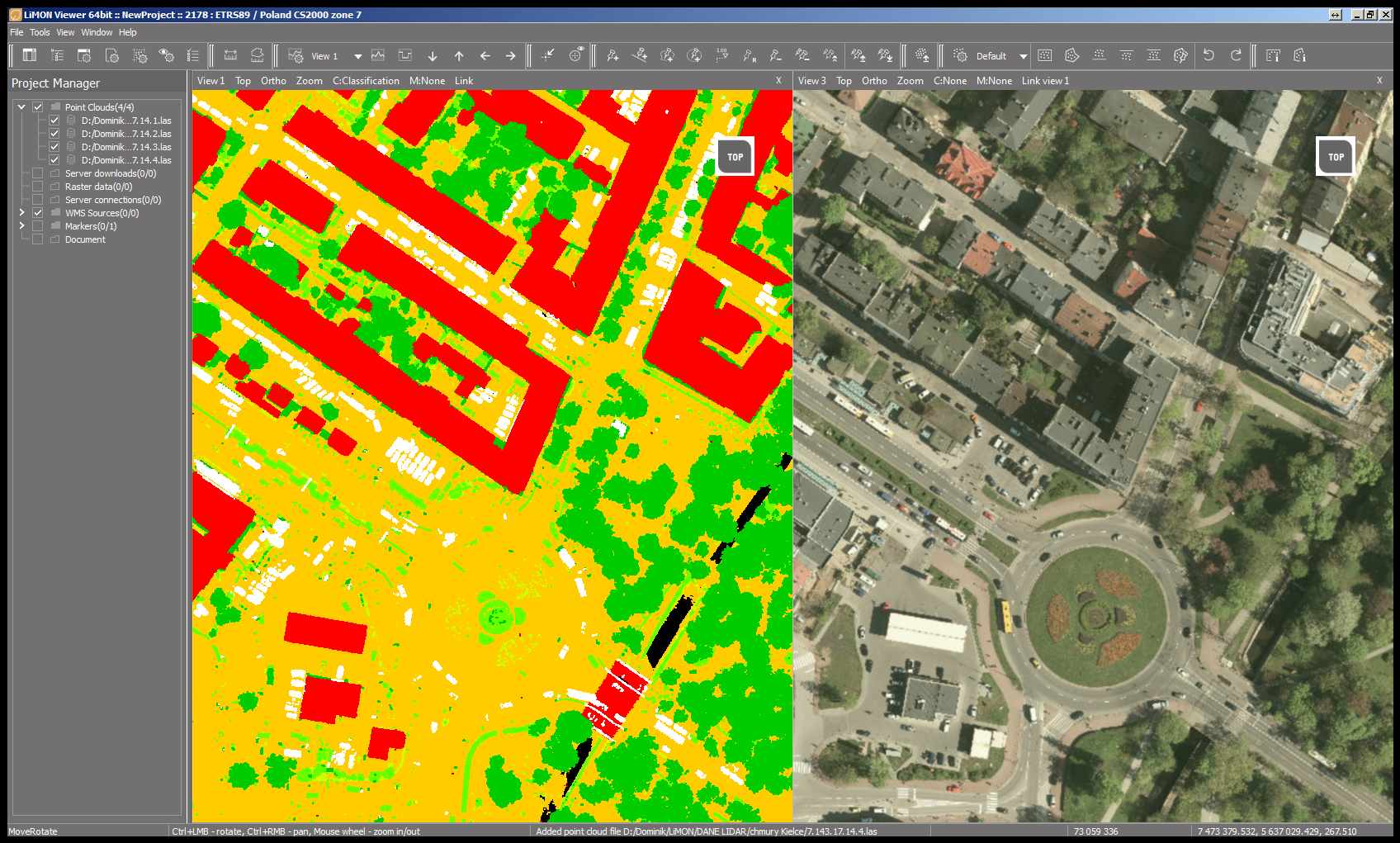
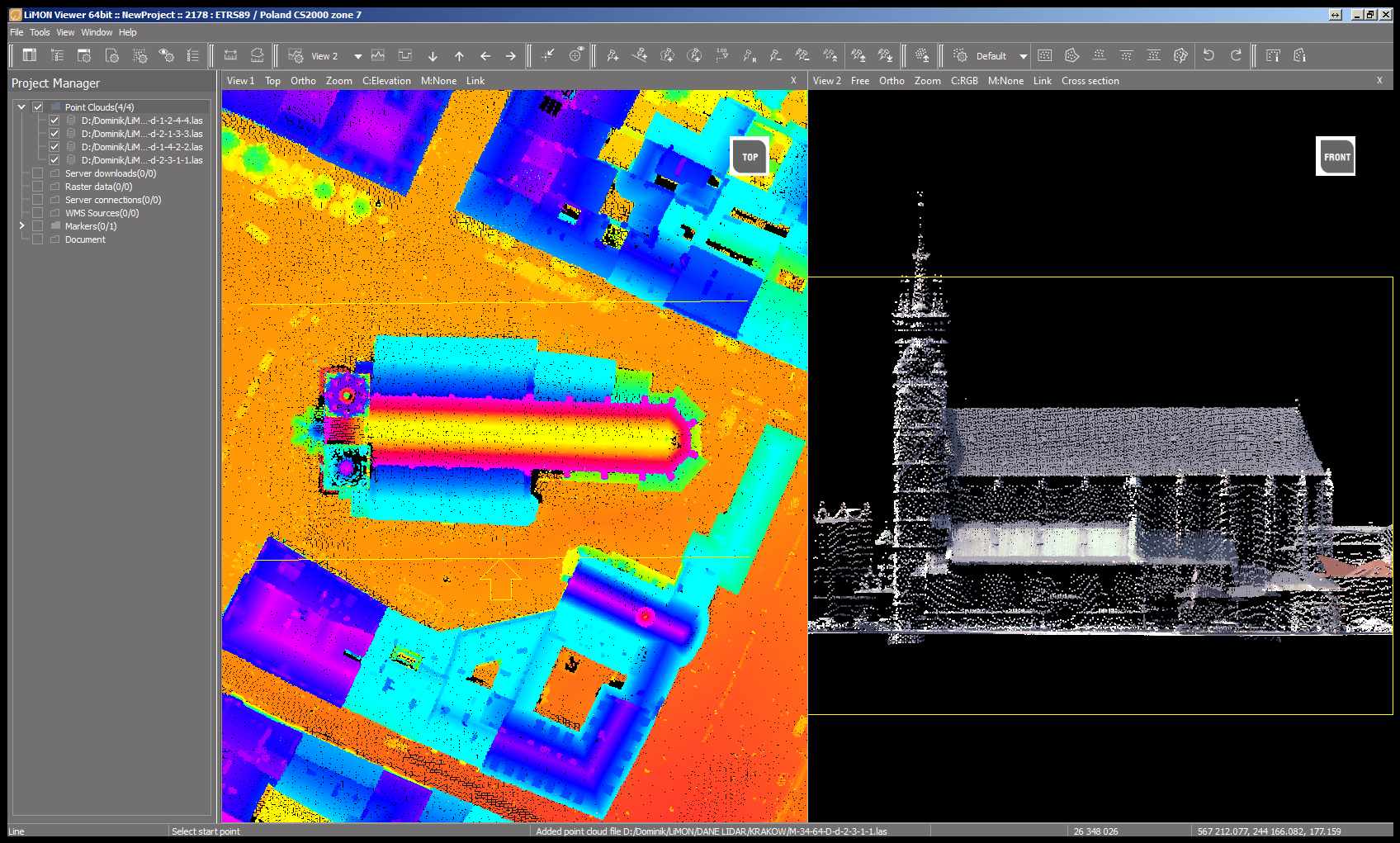
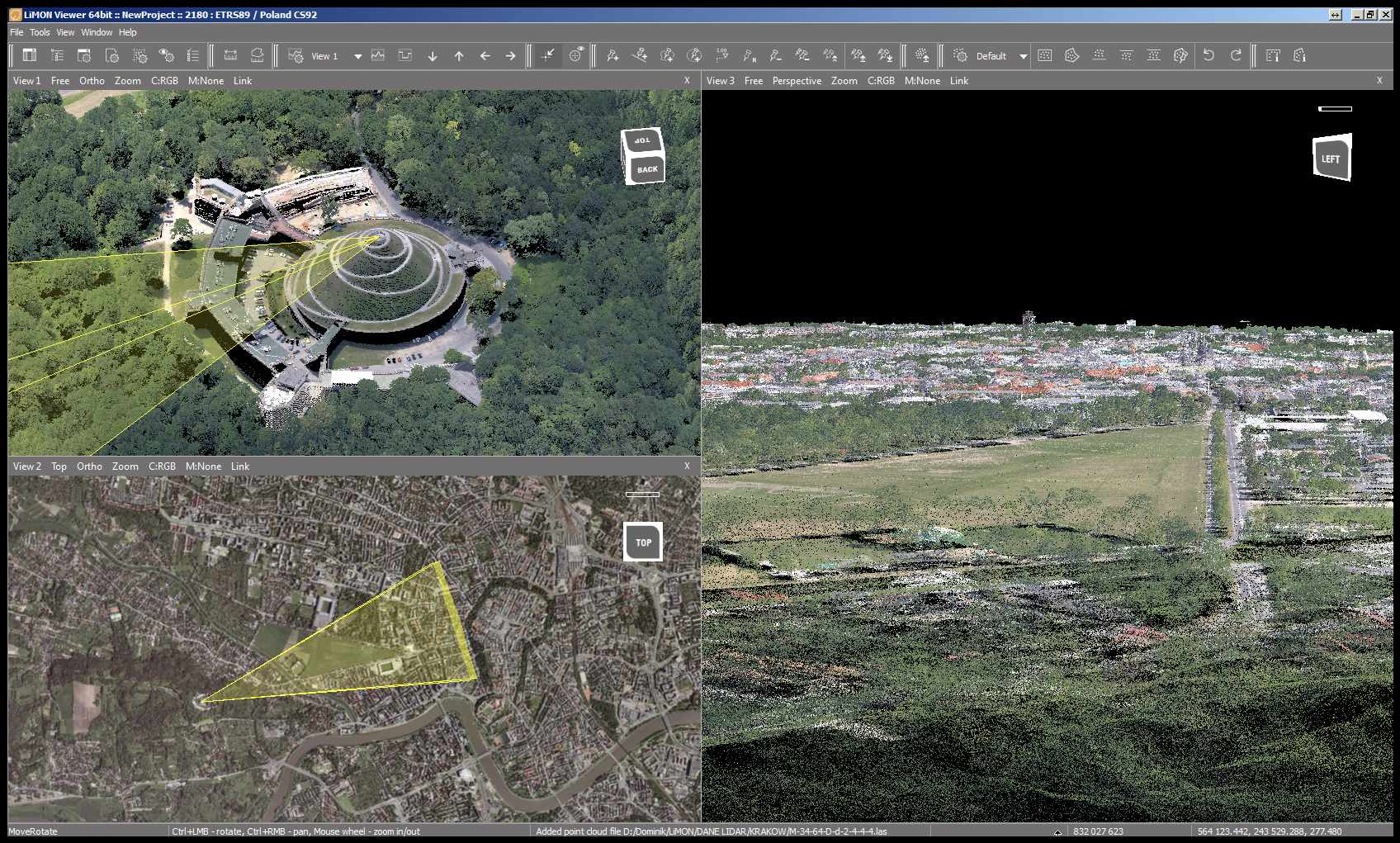
Data display
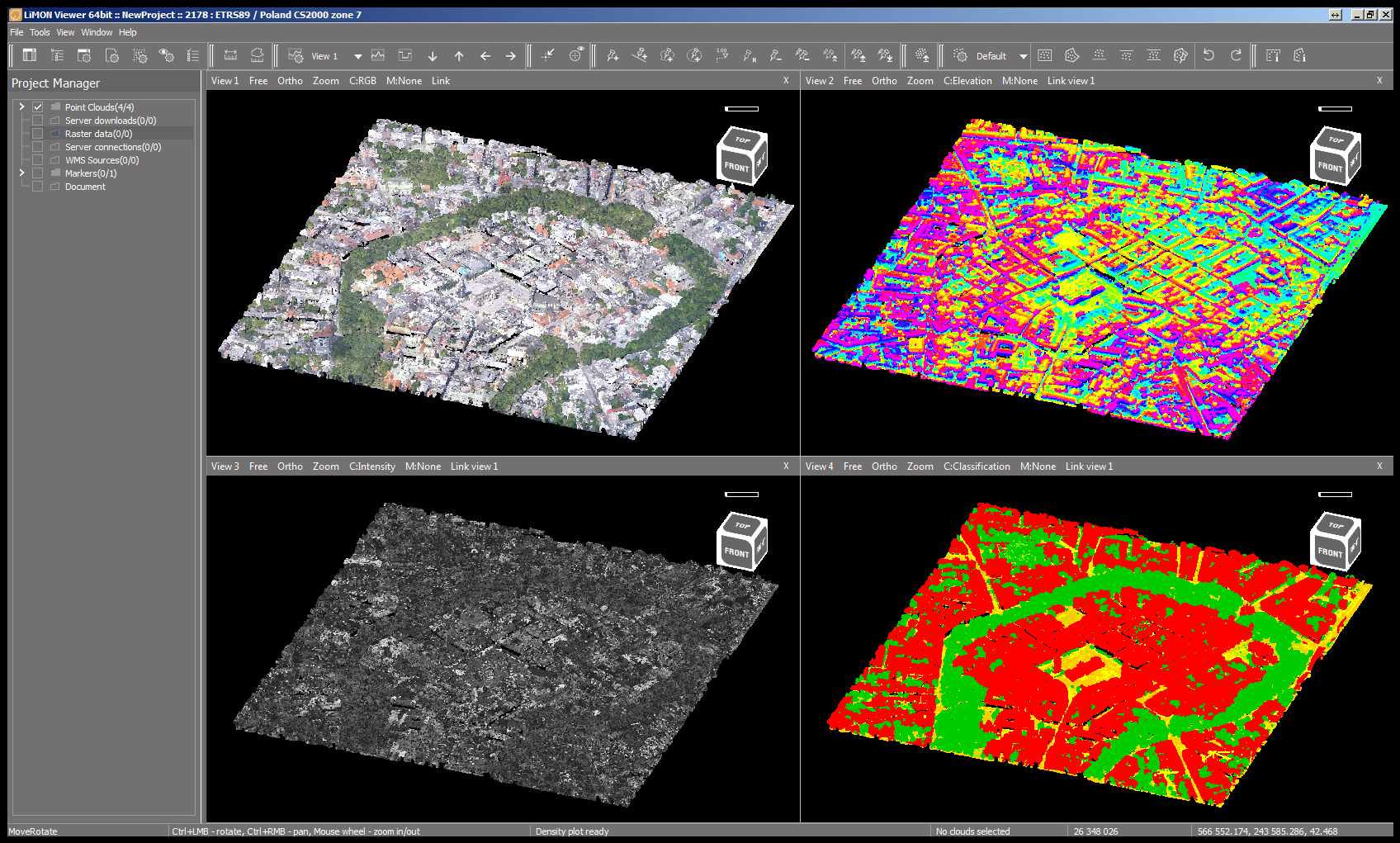
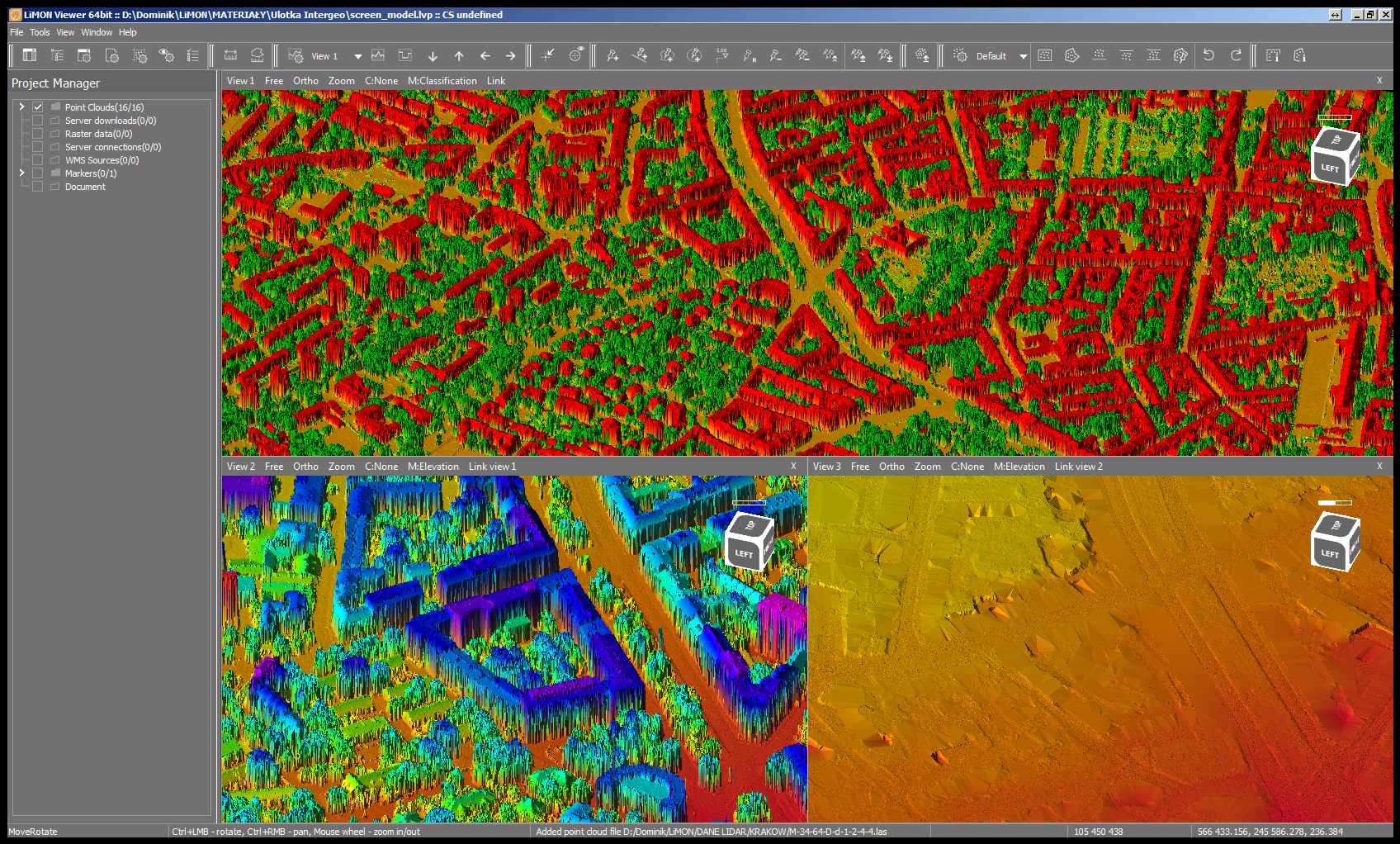
- Up to 4 views that fully support 3D display
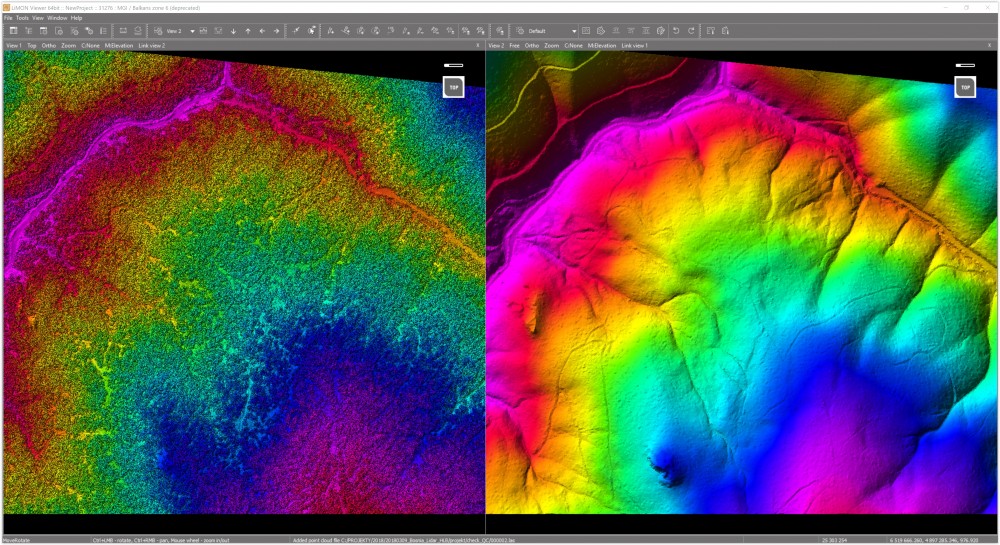
- Point cloud display modes: RGB, Intensity, Elevation, Classification, MIX, File color
Building and displaying 3D surfaces
- Creating 3D surfaces based on point clouds
- Displaying surfaces in Solid, RGB, Intensity, Elevation, Classification, Mix, File color modes
- Displaying surfaces wireframe
- Adjusting the detail render range of surfaces
Displaying 3D models
- GML, OBJ, 3DS, DAE, FBX, IFC
- Displaying models in mode: original (also with texture), uniform, advanced and triangle mesh
- Transformation loaded models: shift, rotation and scale
Manual point cloud classification
- Definition of own classification schemes
- Rectangle, shape and corridor classification
- Classification above and below a line
- Classification with a shape marker
- Classification by Active Z
- Classification in a specific intensity range
Automatic point cloud classification
- Automatic classification of ground
- Automatic classification of buildings
- Automatic classification of vegetation
- Editing parameters of all classification modes
Cooperation with LiMON Server
- Remote access (LAN/WAN) to data shared by LiMON Server
- Project selection
- Choice of data displaying according to the level of density
- Metadata reading
- Display scope of the project from the Limon Server
- Downloading and visualization of LiDAR data
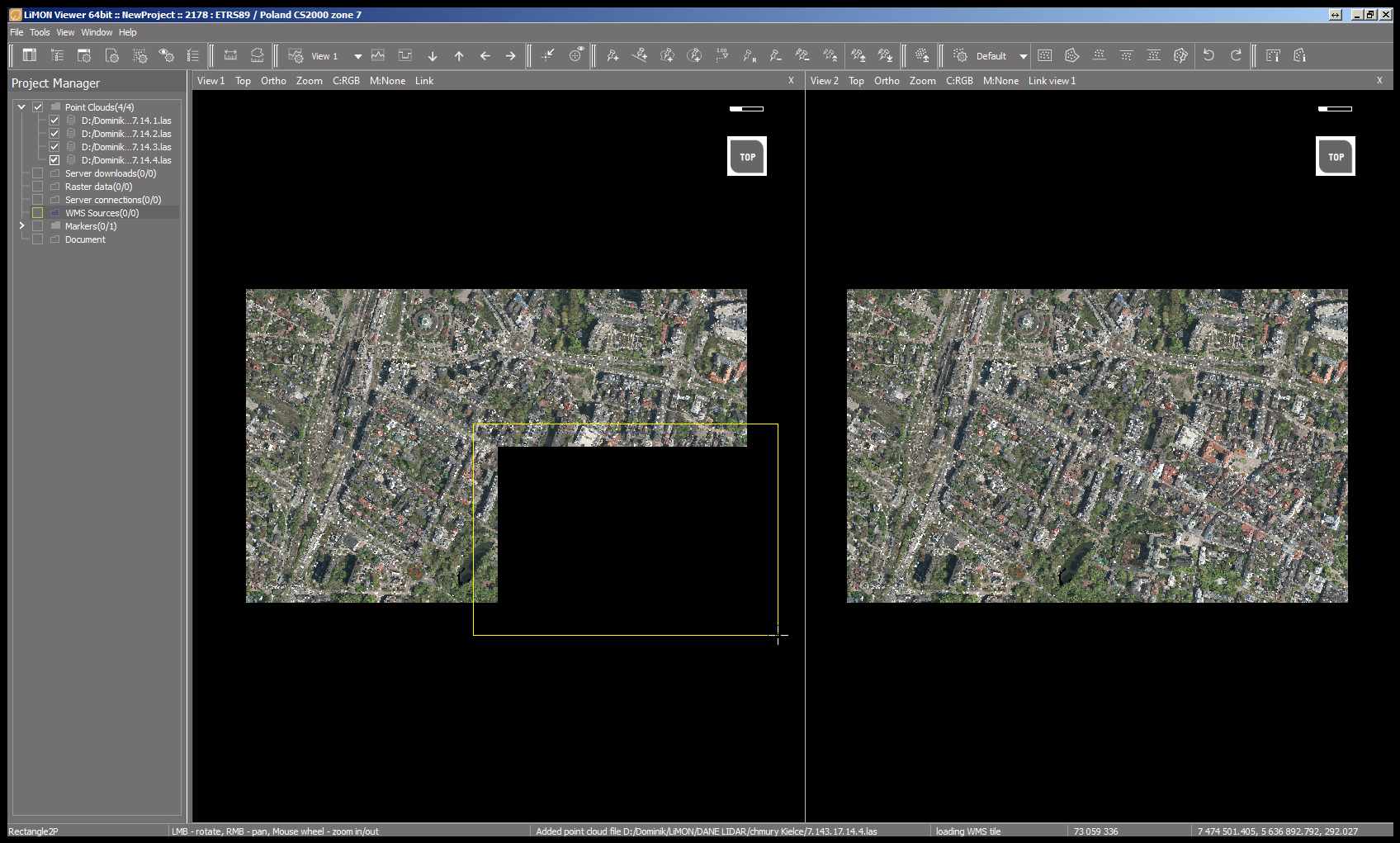
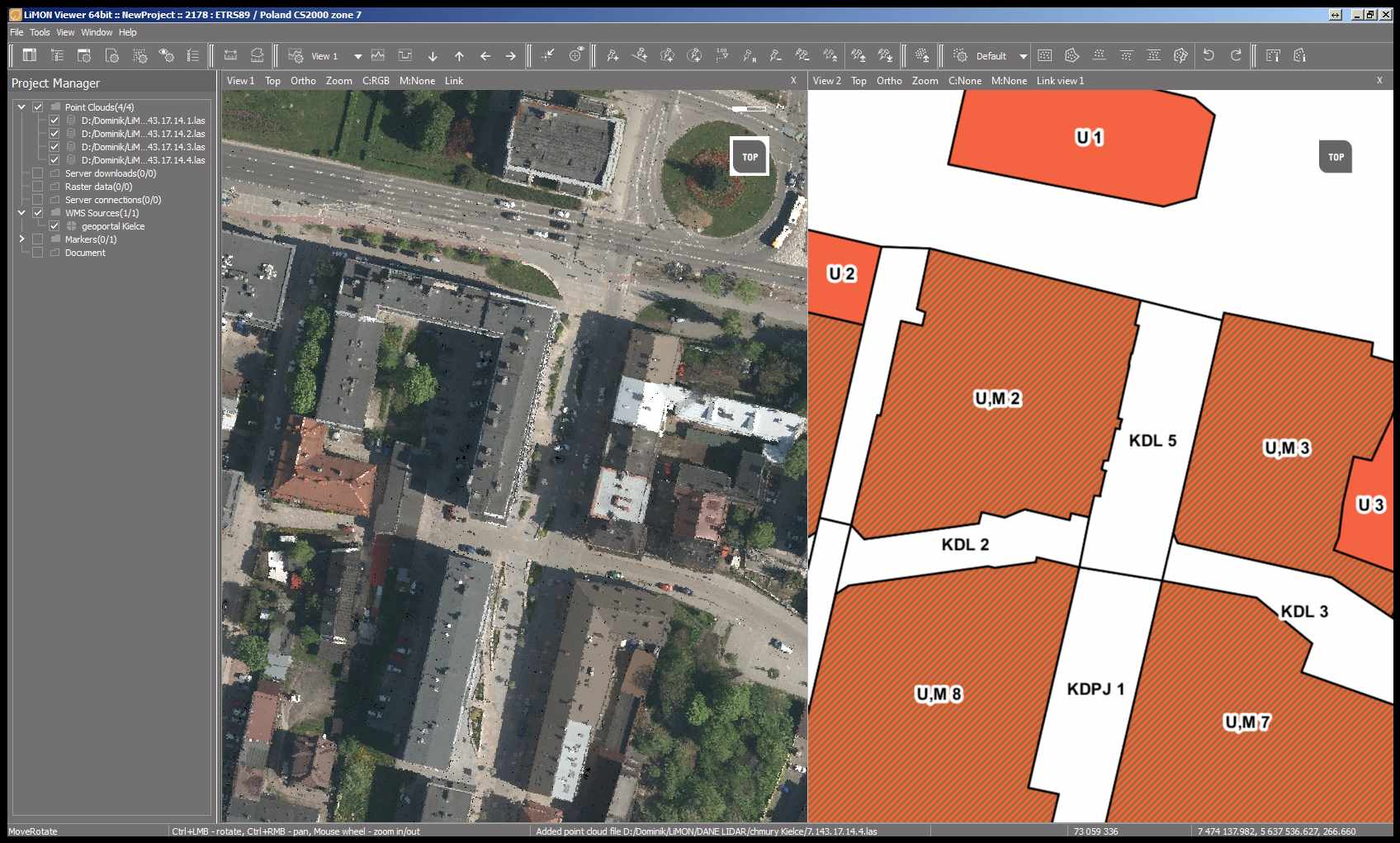
WMS Support
- Definition, saving and reading of WMS sources
- Selection of layers
Raster data
- JPG, JPEG
- JP2, J2K
- TIF, TIFF
- ECW
Profiles
- Profile in selected view
- Polyline profile definition
- Symmetric profile definition
- Fixed width / length
- Z scale factor
- Dynamic move
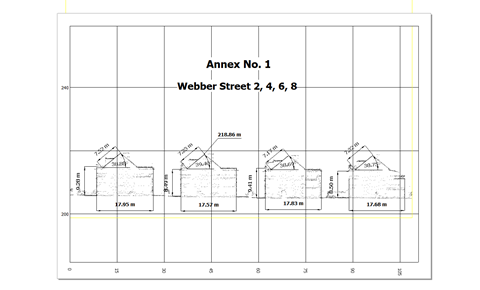
Document creating module
- Dimensioning based on point clouds (distance, height, altitude point, the angle of inclination)
- Page size/color definition, output scale, template
- Setting out of the output scale
- Dimension lines and fonts editing
- Insert and edit names nad grid lines
- Choice global/relative coordinates
- Saving as a image file (JPG, PNG, BMP, TIF, TIFF)
- Export to DXF format (as an integrated raster)
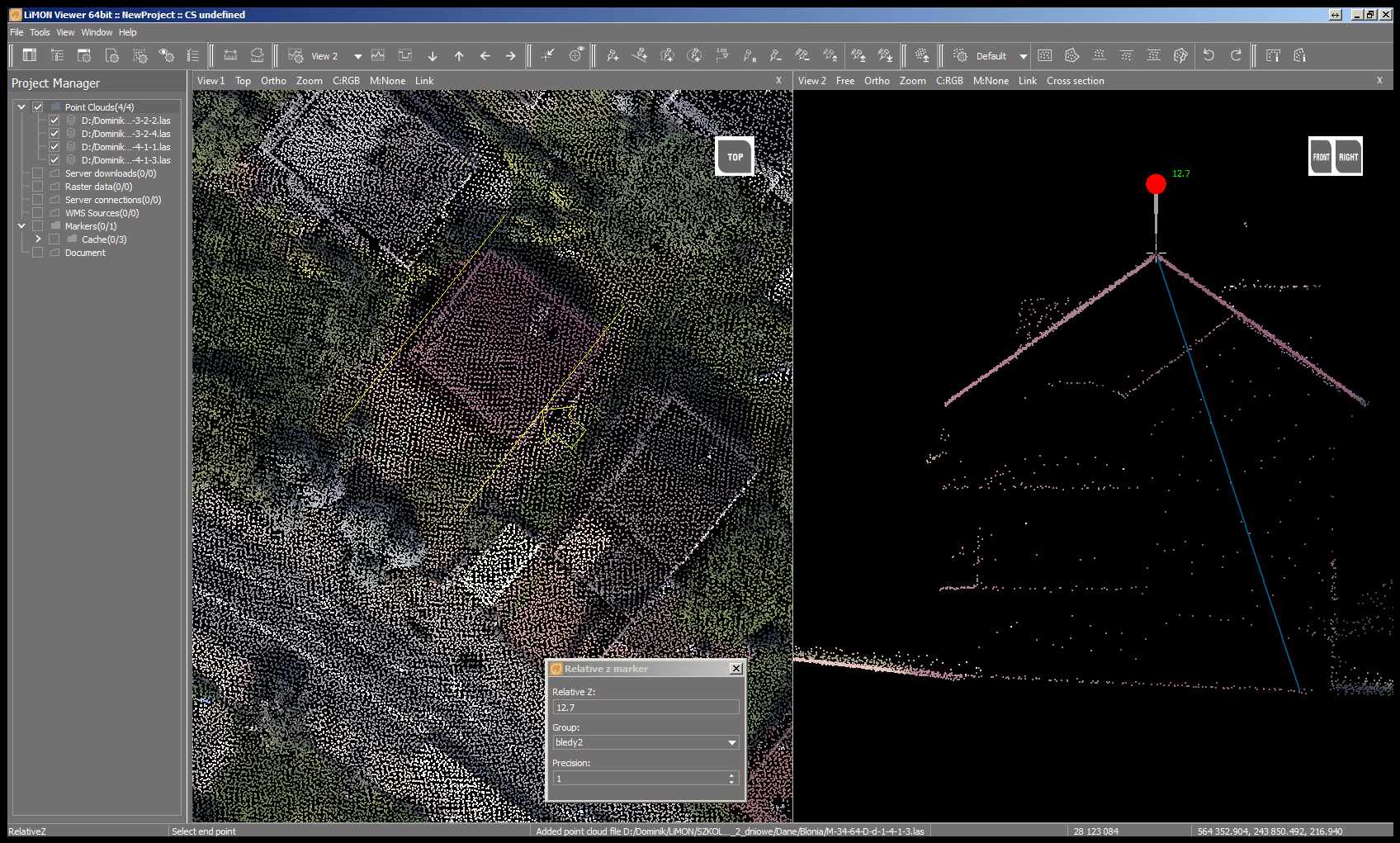
Vector data
- Point markers
- Line markers
- Shape markers
- Circle markers
- Relative height markers
- Markers save / load (KML, SHP, TXT)
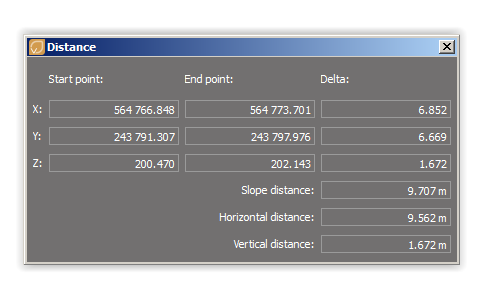
Measurements
- 3D distance
- Area
- Volume
Point cloud snapping
- Snapping to the point cloud (on/ff)
- Precision drawing in the profile view
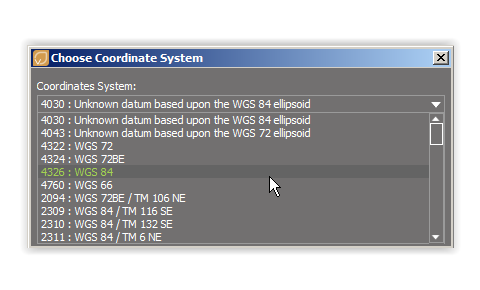
Coordinate systems
- Full EPSG coordinates support
- Point cloud coordinates system transformation
Camera view
- Camera origin (XYZ)
- Camera direction (XYZ)
- Focal length
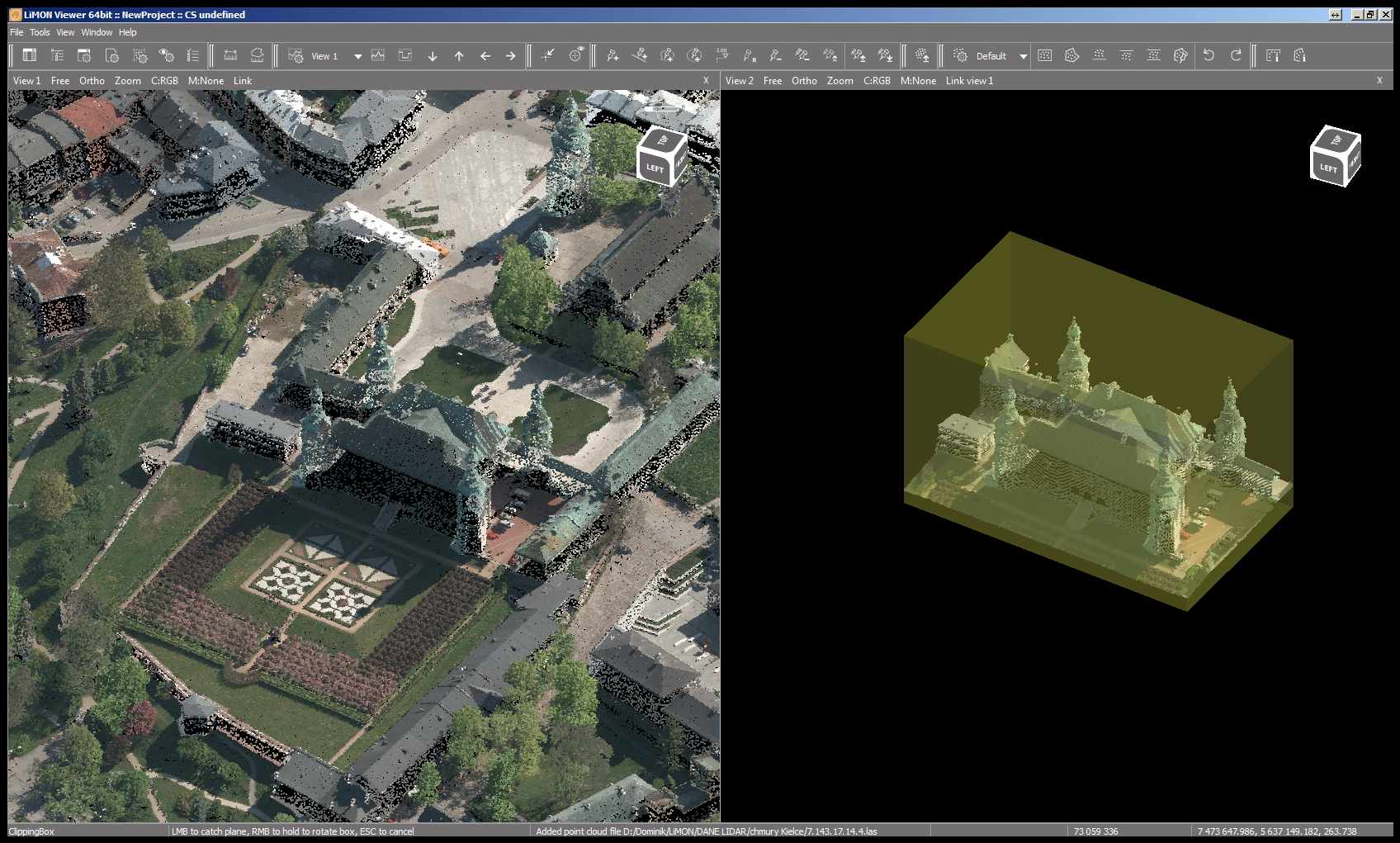
Clipping box
- Clipping box defnition in view
- Clipping planes definition by values
- Dynamic move
UAV
- Wyrównanie chmur punktów
- Wpasowanie GCP
- Klasyfikacja obszarów nadmiarowego pokrycia.
- Kolorowanie chmury punktów
- Kontrola jakości
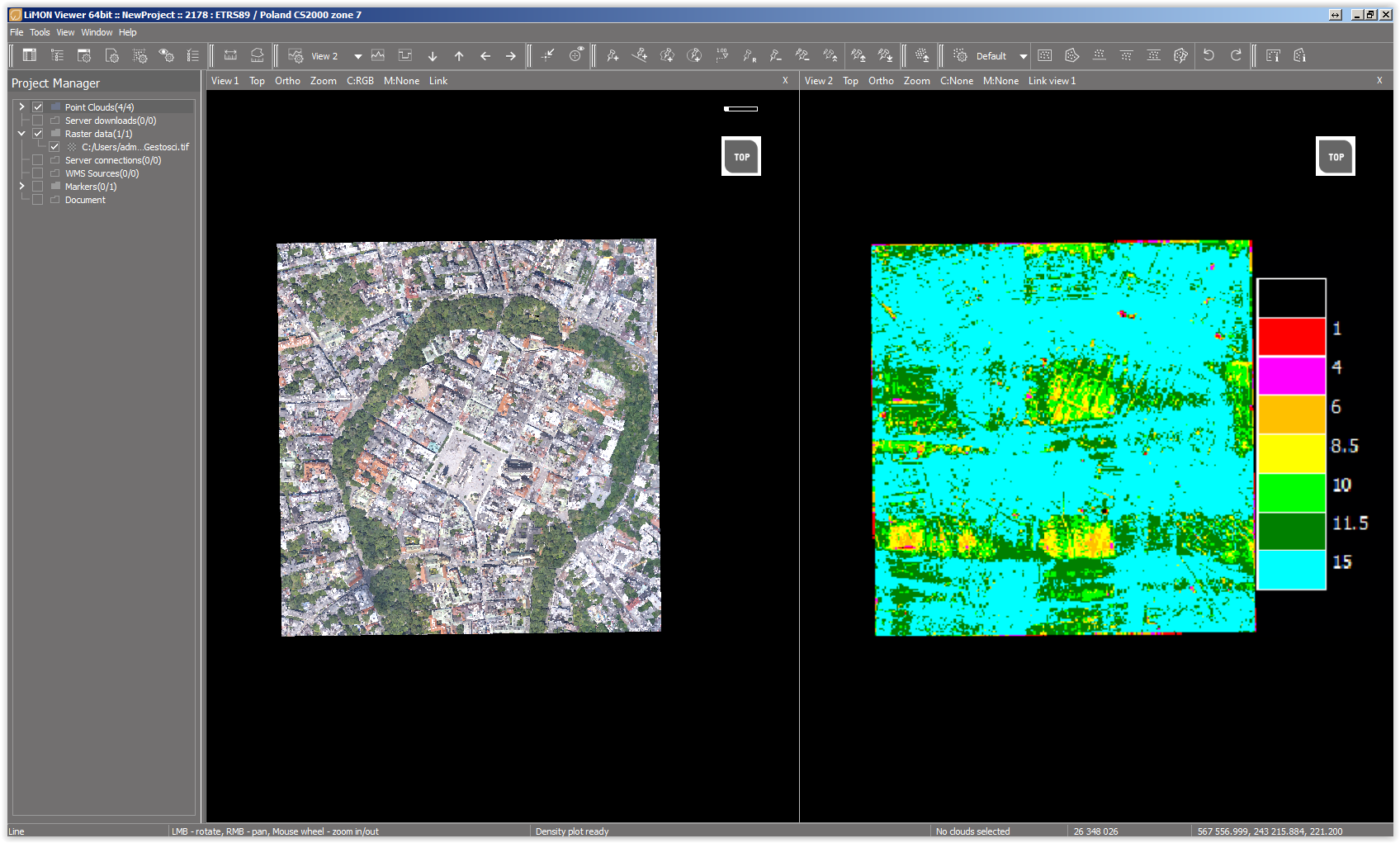
Height models
DTM
DSM
nDSM
CHM
Contourlines